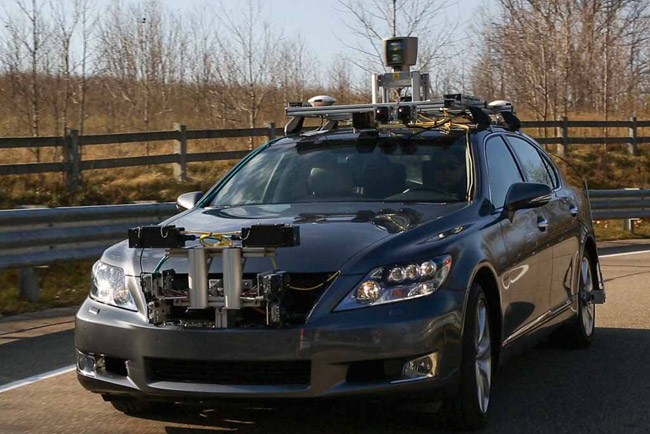
همان طور که می دانید در حال حاضر خودروهای بدون سرنشین یکی از پروژه های بزرگ دنیا هستند که شرکت های مختلفی بر روی آن ها کار می کنند. این خودروها برای جلوگیری از برخورد به موانع و عابرهای پیاده، به سنسورهای مختلفی از جمله لیزرها، رادارها و دوربین های مختلف، تکیه دارند. از دیدگاه شرکت تویوتا، این سنسورها نمی توانند کافی باشند و خودروها نیازمند روش های دیگری برای جمع آوری اطلاعات می باشند. در ادامه همراه ما باشید.
بنا به گفته های مدیران تویوتا، در روش های کنونی جمع آوری داده ها، نقشه ها به ندت به روز رسانی می شوند و این موضوع سبب سودمند نبودن آن ها می شود. برای بهبود این موضوع، شرکت تویوتا در نظر دارد، اطلاعات رانندگی را از سرنشین خودروهای در حال حرکت جمع آوری کند و در واقع نحوه رانندگی بقیه خودروها بر روی رانندگی خودروی بی سرنشین تأثیر خواهد گذاشت.

این کمپانی امیدوار است با شرکت کردن افردا بیشتر برای ارسال نقشه های مسیرشان به صورت مداوم، خطاهای مسیریابی را به کمتر از 2 اینچ کاهش دهند. مسلماً این تنها یکی از راه های بهبود رانندگی خودروهای بدون سرنشین است و همچنان کمپانی های بسیاری بر روی یافتن روش های بیشتر در حال تلاشند.
به طور مثال، یکی دیگر از روش هایی که اخیراً مورد بحث بود، جمع آوری اطلاعات از تصاویر نقشه های بارگذاری شده برای تشخیص اشیاء و موانع روی جاده بود. اما مشکل این روش هزینه بسیار بالای پیاده سازی آن است. با توجه به موارد ذکر شده، زمان زیادی تا صنعتی شدن و استفاده همگانی از خودروهای بدون سرنشین باقی است.
منبع: UberGizmo















نظر خود را اضافه کنید.
برای ارسال نظر وارد شوید
ارسال نظر بدون عضویت در سایت